Elektronische Bremsgeräte für Drehstrom-Asynchronmotoren
Dr. John P. Gibson, Dr. Frank O. Hake
Elektronische Bremsgeräte ermöglichen das verschleißfreie Bremsen von Drehstrom-Asynchronmotoren und bieten eine robuste Alternative zu mechanischen Bremsen, insbesondere bei hohem Trägheitsmoment oder großen Schalthäufigkeiten. Die Funktion wird anhand von praxisbezogenen Anwendungsbeispielen beschrieben.
1. Warum elektronisches Bremsen?
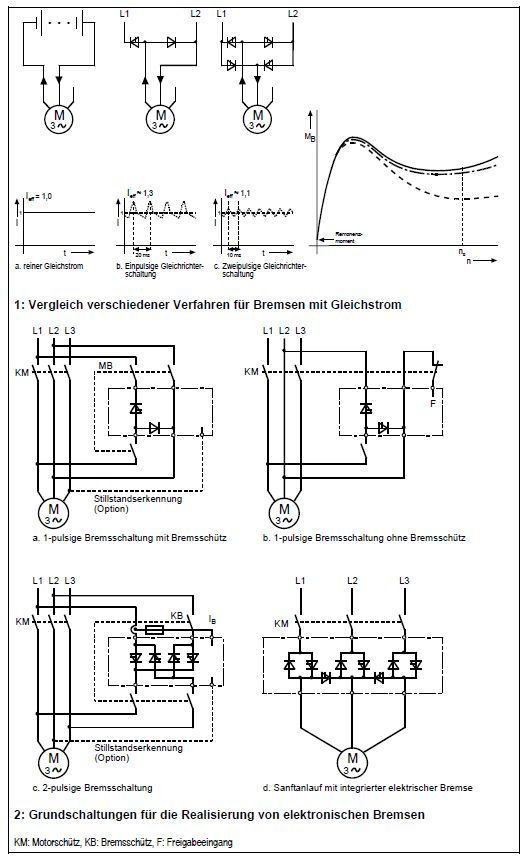
Drehstrom-Asynchronmotoren sind als elektrische Antriebsmotoren am meisten verbreitet. Seit der Verfügbarkeit preiswerter Frequenzumrichter werden Drehstrommotoren auch zunehmend für Anwendungen mit Drehzahlverstellung anstelle der Gleichstromtechnik eingesetzt. Viele Maschinen und Apparate sind mit einer relativ hohen Trägheitsmasse behaftet. Beim Ausschalten läuft die Maschine entsprechend lange nach. In der Tabelle sind einige Beispiele aus der Praxis aufgeführt. Bei diesen Beispielen ist das unkontrollierte Nachlaufen der Maschine potentiell gefährlich für Mensch oder Maschine. Bei besonders gefährlichen Maschinen, z.B. Fleischsägen und Holzbearbeitungsmaschinen, schreiben die Berufsgenossenschaften Mindestanforderungen an die maximal zulässige Bremszeit vor. Die klassische Bremse ist die mechanische Reibbremse, die meist in Form eines Bremsmotors im Motor integriert wird. Für einfache Anwendungen, vor allem bei Anwendungen mit geringer Bremsenergie, sind solche Lösungen sehr wirtschaftlich und sicher. Sobald Bremsenergie und Bremshäufigkeit eine bestimmte Größe überschreiten, müssen andere Lösungen herangezogen werden. Die Verwendung des vorhandenen Antriebsmotors als elektrische Bremse hat sich für solche schwierigen Anwendungen weit verbreitet. In folgenden wird auf Möglichkeiten des Bremsens mit dem vorhandenen Antriebsmotor näher eingegangen.
*Unfallverhütungsvorschriften der verantwortlichen Berufsgenossenschaften
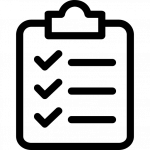
2. Verhalten von Drehstrom-Asynchronmotoren beim Bremsen mit Gleichstrom
Das Verhalten eines Drehstrom-Asynchronmotors beim Bremsen mit Gleichstrom ist gut dokumentiert z.B.[1],[2]. Die drei Phasen der Statorwicklung lassen sich in vielen Varianten verschalten. In Hinblick auf die Minimierung des Aufwandes an Schaltgeräten und Verdrahtung wird die Schaltung entsprechend Bild 1a und 1b mit der Reihenschaltung zweier Phasen fast ausschließlich eingesetzt. Das erreichbare Bremsmoment als Funktion der Drehzahl ergibt im Prinzip die bekannte Drehmoment/Drehzahl- Kurve eines Asynchronmotors, gespiegelt an der senkrechten Geraden durch die halbe Synchrondrehzahl. Der Kurvenverlauf hängt sehr von der Gestaltung des Läufers ab. Theoretisch ist kein Bremsmoment bei Drehzahl Null vorhanden. In der Praxis steht ein kleines Bremsmoment auf Grund der Remanenz der Blechpakete des Läufers zur Verfügung. Bei allen Bremsschaltungen basierend auf Gleichstrom-Einspeisung im Läufer wird die Bremsenergie im Läufer des Motors in Form von Wärme abgesetzt. Bei vernachlässigbarer Bremswirkung der Last ist die Verlustenergie beim Bremsen theoretisch identisch der Verlustenergie beim Anlaufen des Motors. Gegebenenfalls ist der Motor entsprechend auszulegen.
3. Elektronische Bremsschaltungen mit Gleichstromeinspeisung
3.1 Einpulsige Gleichrichterschaltungen
Die einfachste elektronische Bremsschaltung ist die einpulsige Gleichrichterschaltung bei Verwendung einer Thyristor/Dioden-Kombination zusammen mit einer einstellbaren Phasenanschnittsteuerung (siehe Bild 2a). Ein Bremsschütz dient zur Abtrennung der Bremsschaltung während des normalen motorischen Betriebes. Beim Einsatz des Bremsbetriebes ist eine Schutzzeit von 0,3…1,5 s je nach Motorgröße notwendig. Eine einstellbare Zeitstufe begrenzt die Dauer des Bremsstromes auf die voraussichtliche maximale Bremszeit. Bremsgeräte dieser Art sind sehr kompakt, z.B. stehen für Motoren bis 7,5 kW sehr kompakte Bremsgeräte in Kleinschützbreite für Befestigung auf 35 mm DIN-Schienen zur Verfügung (siehe Bild 6a). Die Verwendung der Schaltung in Bild 2a (Reihenschaltung zweier Phasen) hat den weiteren Vorteil, dass eine vollelektronische automatische Stillstandserfassung durch Überwachen der Spannung in der dritten unbeschalteten Phase möglich ist. Sobald der Antriebsmotor steht, wird der Bremsstrom elektronisch abgeschaltet und nach Abklingen des Bremsstromes wird das Bremsschütz zum Öffnen freigegeben. Eine weitere Entwicklung der bekannten einpulsigen Bremsschaltung stellt die Verwendung von zwei Thyristoren anstelle der Thyristor/Diode-Kombination dar (siehe Bild 2b). Da die Bremsschaltung funktionell still liegt, wenn die Thyristoren nicht gezündet werden, ist der Betrieb ohne Bremsschütz möglich. Daher kann bei dieser Variante elektronisches Bremsen mit minimalem Aufwand und Platzbedarf im Steuerschrank realisiert werden. Die bisher beschriebenen einpulsigen Bremsschaltungen stellen eine sehr wirtschaftliche Lösung, insbesondere bei kleiner Leistung, dar. Der zeitliche Stromverlauf weicht aber erheblich vom reinen Gleichstrom ab. Folgende Nebeneffekte sind zu beachten:
- Geräuschentwicklung, verursacht durch Pendelmomente vor allem mit f = 50 Hz
- Der Effektivwert des Stromes für die gleiche Bremswirkung ist ca. 30% höher als bei reinem Gleichstrom. Die Wärmeverluste in der Statorwicklung sind damit um ca. 70 % höher
- Das Bremsmoment bei hoher Drehzahl ist nennenswert geringer als bei reinem Gleichstrom (siehe Momentenkurven in Bild 1). Die Ursache liegt in den von der Phasenanschnittsteuerung erzeugten Stromoberschwingungen, die ungewollte motorische Momente vor allem bei hoher Drehzahl erzeugen.
3.2 Vollgesteuerte zweipulsige Bremsschaltungen
Diese Nachteile lassen sich durch Einsatz einer vollgesteuerten zweipulsigen Gleichrichterschaltung weitgehend beseitigen (siehe Bild 1c). Für den gleichen Mittelwert des Bremsstromes sind bei dieser Schaltung die Pendelmomente und der Effektivwert des Bremsstromes erheblich kleiner. Die Auswahl der Größe eines Bremsgerätes richtet sich in erster Linie nach dem erforderlichen Bremsstrom, wobei bei gleichem Bremsstrom die Bremswirkung eines Gerätes mit einem zweipulsigen Gleichrichter in der Praxis ca. 10 % höher als die eines Gerätes mit einpulsigen Gleichrichtung ist. Es wird unterschieden zwischen:
- Anwendungen, die ein kurzes Bremsen mit einem möglichst hohen Bremsstrom fordern. Hier wird als Auslegungsgrundlage üblicherweise ein Bremsstrom von ca. 2 x Nennstrom herangezogen, wobei die Bremszeit bei diesem Bremsstrom auf 12 s begrenzt ist.
- Anwendungen, die ein langes Bremsen (z.B. Zentrifugen) oder sogar Dauerbremsen (z.B. Rollengänge) fordern. Hier wird als Auslegungsgrundlage der Dauerbremsstrom spezifiziert. Bei hohen Leistungen ist Zwangsbelüftung des Bremsgerätes mit einem Lüfter sinnvoll.
- Anwendungen mit Mehrfachbremsvorgängen mit verschiedenen Antrieben.
Eine Weiterentwicklung ist der Einsatz einer Strombegrenzung zur Vereinfachung der Inbetriebnahme. Am Gerät wird der Steuerwinkel der Phasenanschnittsteuerung d.h. die Bremsspannung eingestellt. Der tatsächliche Bremsstrom stellt sich dann entsprechend dem Widerstand im Bremskreis ein. Dieser Widerstand hängt aber sehr sowohl von der Größe und Auslegung des Motors als auch von der Verkabelung ab. Die Gefahr, dass ein zu hoher Bremsstrom das Bremsgerät beschädigt, ist groß. Geeignete Messgeräte für die Messung des Bremsstroms (Gleichstrommessung) sind bei den meisten Kunden aber nicht vorhanden. Mit einer integrierten Strombegrenzung wird der maximale Bremsstrom des Gerätes automatisch begrenzt, die Inbetriebnahme wesentlich vereinfacht. Darüber hinaus kann ein kleines Bremsgerät für das Bremsen größerer Motoren mit vermindertem Bremsmoment ohne Risiko eingesetzt werden.
3.3 Kombination von Gleichstrombremse mit elektronischem Sanftanlauf
Geräte für den sanften elektronischen Anlauf von Drehstrommotoren bringen Vorteile hinsichtlich des einstellbaren Anlaufverhaltens und des reduzierten Anlaufstromes. In der Praxis finden sich Geräte für kombiniertes Anlaufen und Bremsen von Drehstrommotoren. Die meisten dieser Geräte verwenden ein externes Bremsschütz für das Auslösen des Bremsbetriebes, wobei eine Bremseinschaltverzögerung von 0,3…1,5 s je nach Motorgröße vorgesehen ist. Nach Anwählen des Bremsbetriebes bleiben diese Geräte im Bremsbetrieb bis der Stillstand erreicht wird. Erst nach Abklingen des Stromes kann das Bremsschütz sicher geöffnet werden. Im folgenden wird ein vollelektronisches Verfahren (d.h. ohne Bremsschütz) für die Realisierung von elektronischem Anlaufen und Bremsen erläutert. Bild 2d zeigt die Grundstruktur der zugehörigen Schaltung. Die drei Doppelanordnungen von Thyristor-Dioden stellen die Grundschaltung eines elektronischen Sanftanlaufgerätes dar. Ein Teil dieser Schaltung bildet zusammen mit den zwei zwischen den Motorphasen befindlichen Freilauf-Thyristoren eine einpulsige richtungsabhängige Bremsschaltung.
Mit Hilfe einer netzsynchronisierten Steuerung kann beliebig oft zwischen Treiben und Bremsen umgeschaltet werden. Typische Umschaltzeiten bei einem 75 kW Motor sind:
- Umschalten von Treiben (Drehstrom) auf Bremsen (Gleichstrom): 30…100 ms je nach Drehzahl.
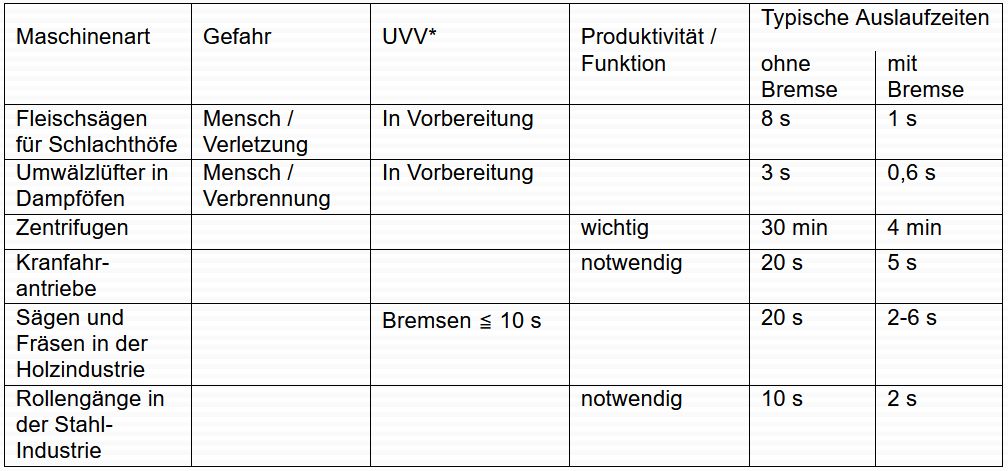
- Umschalten von Bremsen (Gleichstrom) auf Treiben (Drehstrom), 20 ms einschließlich Abkommutieren des Bremsstroms. Diese Kombination von Treiben und Bremsen ist die Basis eines robusten Antriebes für den Betrieb in zwei Quadranten. Ein typisches Anwendungsbeispiel sind Fahrantriebe für Brückenkrane (siehe Bild 3). Folgende Betriebszustände lassen sich bei dem Fahrantrieb je nach Position des Meisterschalters beliebig und verzögerungsfrei einstellen:
- Treiben mit einstellbarem Anlaufmoment.
- Weiterfahrt mit stromlosem Antrieb, d.h. die Kranbrücke fährt auf Grund ihrer kinetischen Energie weiter.
- Elektronisches, einstellbares Bremsen.
- Kontern mit automatischer Stillstandserkennung zum Einleiten der Gegenfahrt.
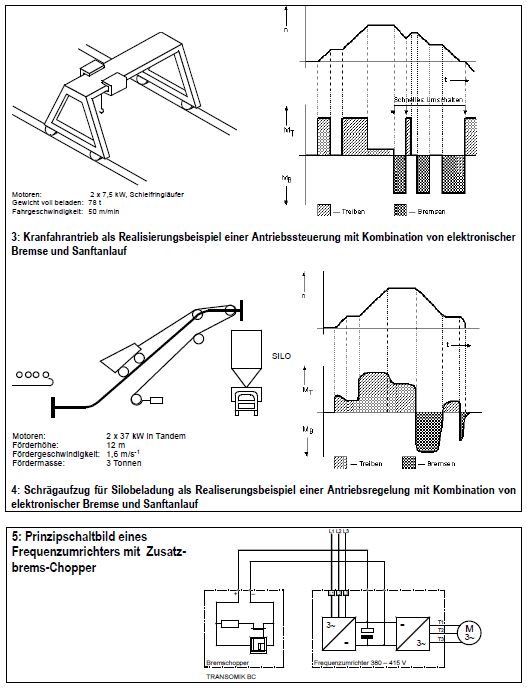
Die Schaltung nach Bild 2d ist auch als Basis eines Antriebes mit Drehzahlregelung für lastunabhängiges Anfahren, Bremsen und Positionieren schwerer Maschinen und Fördereinrichtungen sehr gut geeignet. Bild 4 zeigt die Kenndaten einer mit diesem Antriebskonzept ausgeführten Anlage. Ein typisches Gerät mit Kombination Bremsen und Treiben ist in Bild 6c abgebildet.
4. Bremsen drehzahlveränderlicher, von Frequenzumrichtern gespeister Antriebe
Diese Betrachtung beschränkt sich auf das Bremsen bei Verwendung von Frequenzumrichtern mit einem Gleichspannungszwischenkreis, so genannten U-Umrichtern. Beim Bremsen wird Energie in den Zwischenkreis zurückgespeist mit dem Ergebnis, dass die Zwischenkreisspannung steigt. Prinzipiell kann diese überschüssige Energie im Zwischenkreis mit Hilfe eines Bremschoppers (Bild 5) vernichtet werden. Wird diese Energie nicht im ausreichendem Maße abgeführt, steigt die Spannung im Bremsfall, bis die Abschaltgrenze des Umrichters erreicht ist. Betriebsstörungen sind das Resultat. Es kommt relativ oft vor, dass bei der Projektierung eines Antriebs der Bremschopper falsch ausgelegt wird. Typische Beispiele sind:
- Lüfterantriebe großer Leistung, die ein hohes Trägheitsmoment aufweisen.
- Hubantriebe, die über eine relativ lange Zeit im Senkbetrieb fahren müssen.
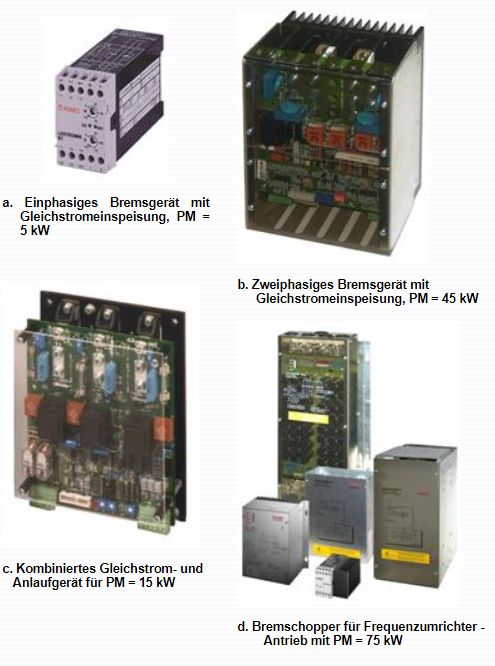
Als Abhilfe, vor allem für die nachträgliche Erhöhung der Bremsleistung eines Frequenzumrichters, hat KIMO eine Baureihe von elektronischen Bremschoppern entwickelt. Die Verwendung von MOSFET- und IGBT- Technik für das Schalten des festen Bremswiderstandes (interner oder externer Bremswiderstände) erlaubt eine einfache und robuste Realisierung. Bisher wurden Bremschopper bis zu 1.700 kW Leistung ausgeführt (siehe Bild 6d).
5. Zusammenfassung
Mehrere elektronische, verschleißfreie Bremseinrichtungen wurden beschrieben. Dabei wurde der Schwerpunkt auf die wirtschaftliche Ausführung für robusten Industrieeinsatz gelegt. Die wesentlichen Vorteile der beschriebenen Bremsgeräte sind
- bei Antrieben geringer Leistung: Platzersparnis im Schaltschrank durch Betrieb ohne Bremsschütz,
- bei Antrieben hoher Leistung: Verbesserung des Bremsmoments (insbesondere bei hoher Drehzahl) durch Verwendung einer vollgesteuerten Schaltung,
- bei Antrieben mit U-Umrichter: nachträgliche Erhöhung des Bremsmoments durch Einsatz eines Zusatz-Brems-Choppers.
Eine effiziente und energiesparende Alternative bietet die Rückspeisung der Bremsenergie in das Netz. Dies geschieht mit Hilfe eines zusätzlichen Umrichters in so genannten Active-Front-End-Lösungen oder mittels vollrückspeisefähiger Umrichter, wie von KIMO mit dem TRANSOMIK U2 realisiert. Letztere sind einbaukompatibel mit Ihren Kollegen der normalen Umrichterreihe TRANSOMIK U1 bis 15 kW.
Literaturhinweise
[1] Sauer, H-G, König D, Goeke K-D: Bremsen von Drehstrommotoren mit Gleichstrom. antriebstechnik 31 (1992) Nr.6
[2] Schemanske, R: Electronic Motor Braking. IEEE Trans IA, Vol. IA-9, No. 5, Sept/Oct 1983